我們創新的多鏡頭相機解決方案提供無與倫比的影像能力,實現令人驚豔的180/360度全景、先進的複合影像感測器融合應用,以及精準的深度感測立體影像。

Ability的創新動態拼接技術是影像領域的革命性突破。透過將拼接區域分割成多個較小的區域,我們的算法可以在相機內直接拼接影像,省去繁瑣的電腦或應用程式後製過程。
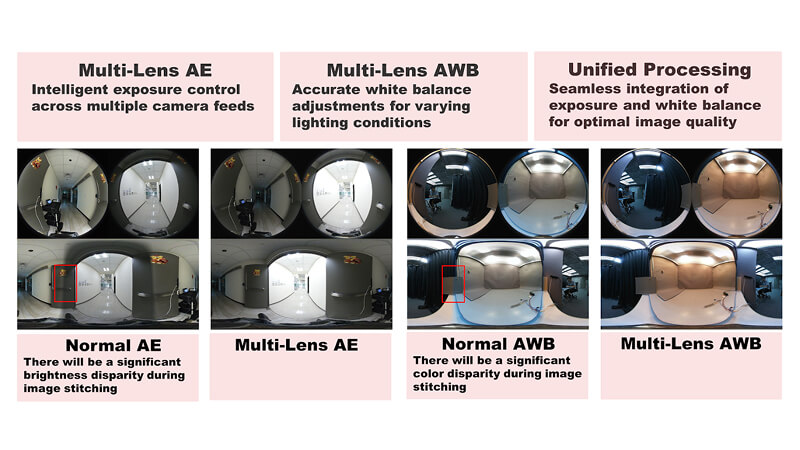
傳統拼接技術不但運算緩慢同時造成畫面扭曲,影響觀看體驗。我們的獨家動態演算法,能即時分析並校正不同距離物體的視角差異,確保拼接後的畫面自然、無縫。
在將多張影像拼接成一張全景圖時,如何處理不同影像之間的差異是一個關鍵的挑戰。這些差異主要來自於以下兩個方面:
因此,我們需要超越單一影像畫質調整,採用更複雜的方法來處理這些差異。
另外,處理影像差異的關鍵考量如下:
通過仔細處理這些因素,我們可以獲得高品質的拼接影像,準確地呈現原始場景。
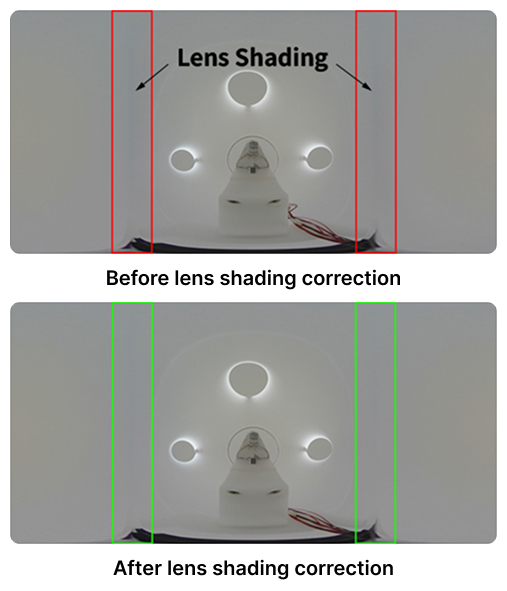
為了解決不同鏡頭拍攝的影像在邊緣亮度不均的問題,我們開發了一套預校正流程。將相機置於一個發出均勻光亮的積分球內,我們可以精準測量並補償這些亮度差異。
透過實施這項預校正流程,我們可以在降低整體成本和提高生產靈活性的同時,提供高品質的拼接全景圖。
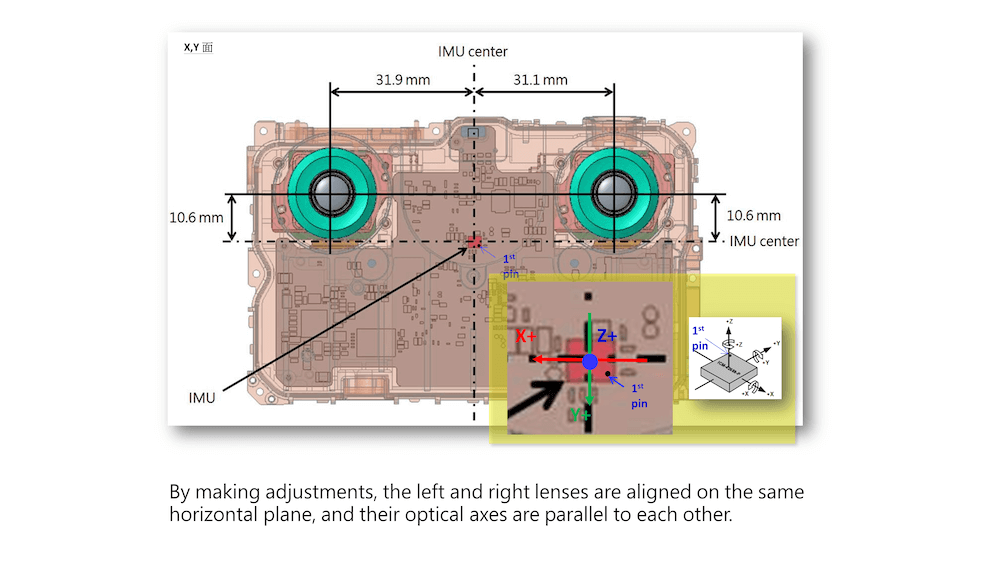
我們的水平穩定算法利用慣性測量單元(IMU)的數據,對影像感測器影像進行防抖補償。通過分析IMU的數據,我們可以準確地確定相機的方位,並對影像幀進行適當的校正。
我們的滾動快門校正算法利用慣性測量單元(IMU)的數據,以有效降低CMOS感測器中滾動快門所造成的果凍效應。通過分析IMU的加速度和角速度數據,我們可以準確地計算相機的運動軌跡,並對擷取的影像進行適當的校正。
透過將滾動快門校正整合至影像系統中,可提升影像品質、減少失真,並改善應用整體效能。
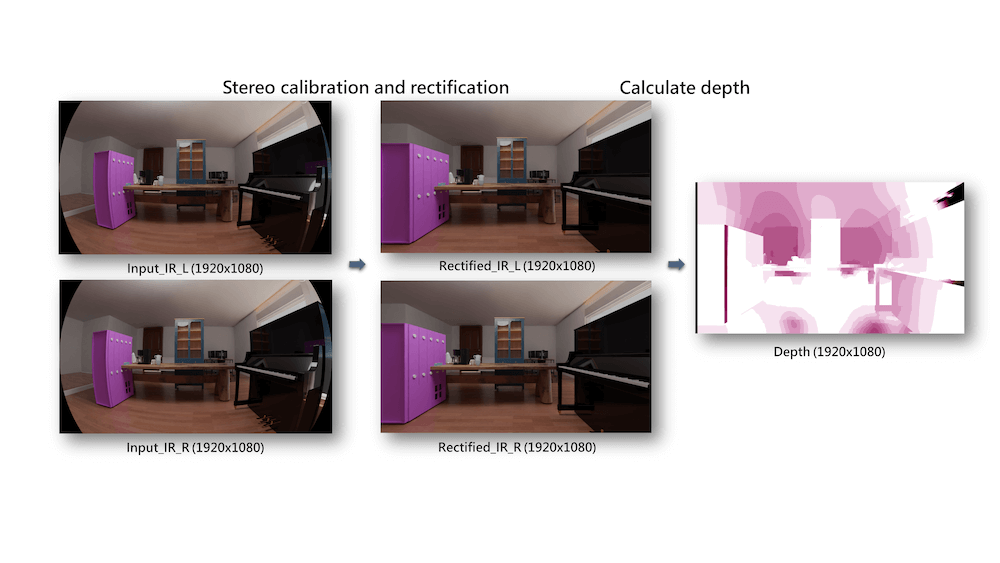
我們的立體深度感測算法包含兩個關鍵步驟: